Set up Spot
The features described in this section are currently in Beta and are only available to customers via the Early Adopter program. For more information and to sign up, visit the Early Adopter Group on the Cognite Hub.
Once you completed the general setup, configure the Spot-specific settings to connect Spot to InRobot. For better experience with the InRobot functionality, use Spot Enterprise with Spot Cam + IR and Core I/O with the internet access or Spot EAP 2.
Connect Spot Core to the internet
Learn about the Spot CORE I/O specifications and how to connect the Spot CORE I/O to the internet.
Download Spot integration
To download the Spot CORE I/O integration:
- Navigate to the
CDFportal application. - In the Integrate dropdown list, select Connect to source systems.
- Select and download the Cognite Boston Dynamics Spot Integration extractor.
Learn more about data extraction.
Deploy Spot device agent to your Boston Dynamics Spot
Set environment variables
Copy the env. template and follow the guidance below to fill in the environment variables.
env. template
#Deployment environment variables
# Video streaming
STREAM_TARGET_BITRATE=100
STREAM_FRAME_REFRESH_INTERVAL=30
STREAM_IDR_INTERVAL=30
# Cognite
COGNITE_CLIENT_ID=abc1234
COGNITE_CLIENT_SECRET=abc1234
COGNITE_TENANT_ID=abc1234
COGNITE_PROJECT=<project>
COGNITE_CLUSTER=<cluster>
# Boston dynamics
BOSDYN_HOSTNAME=192.168.50.3
BOSDYN_CLIENT_USERNAME =user
BOSDYN_CLIENT_PASSWORD=<password>
MISSION_PARSER_SERVICE_PORT=5533
DATA_UPLOAD_SERVICE_PORT=5534
SERVICE_HOST_IP=192.168.50.5
ROBOT_NAME="Spot Robot 1"
SPOT_DOCK_ID=520
ENABLE_ESTOP_HIJACK=False
# Video streaming
VIDEO_STREAM_ID=5
WEBRTC_JANUS_ADDRESS=<janus instance|EU,US>
WEBRTC_JANUS_ROOM=<janus room id>
WEBRTC_JANUS_FORWARD_VIDEO_PORT=<forward port>
WEBRTC_JANUS_FORWARD_SECRET=<room admin password>
WEBRTC_CONFIG="config" or "config-twilio"
Docker images
| Parameter | Description |
|---|---|
TAG | Enter the latest version of the device agent, for example, 0.5.0. |
REPOSITORY | Enter cognite/. |
Cognite
| Parameter | Description |
|---|---|
COGNITE_CLIENT_ID | Enter client ID. |
COGNITE_CLIENT_SECRET | Enter client secret. |
COGNITE_TENANT_ID | Enter |
COGNITE_PROJECT | Enter the name of the |
COGNITE_CLUSTER | Enter the name of the |
Boston Dynamics
| Parameter | Description |
|---|---|
BOSDYN_HOSTNAME | Enter the IP address of the robot found on the 192.168.50.3. |
BOSDYN_CLIENT_USERNAME | Enter the Spot username, for example, user. |
BOSDYN_CLIENT_PASSWORD | Enter the Spot password. |
MISSION_PARSER_SERVICE_PORT | Leave the default value of 5533. |
DATA_UPLOAD_SERVICE_PORT | Leave the default value of 5534. |
SERVICE_HOST_IP | Enter the IP address of the |
SPOT_DOCK_ID | Enter the ID of the fiducial on the docking station, for example 520. If the robot has no docking station, remove this parameter. |
ENABLE_ESTOP_HIJACK | Allow the device agent to take control over the emergency stop from any other entity (tablet, other agents running on Spot). Default value is False. |
3D
| Parameter | Description |
|---|---|
DEFAULT_THREED_MODEL | Optional. Enter the name of the default 3D model. |
Video streaming
| Parameter | Description |
|---|---|
VIDEO_STREAM_ID | Enter the video stream ID. |
WEBRTC_VERSION_TAG | Enter the version of the video docker image. |
WEBRTC_ADDRESS | Enter the address to the instance. |
WEBRTC_ROOM | Enter the room ID. |
WEBRTC_FORWARD_VIDEO_PORT | Enter the video port. |
WEBRTC_FORWARD_SECRET | Enter the room admin password. |
Install Device Agent on Spot CORE I/O
Copy the .env file to the Spot CORE I/O. Run the following command via the robot Ethernet or Wi-Fi:
scp -P 20022 ${path/to/.env} spot@${spots_ip}:~/
ssh -p 20022 spot@${spots_ip}
sudo mkdir -p /data/cognite/
sudo cp ~/.env /data/cognite/
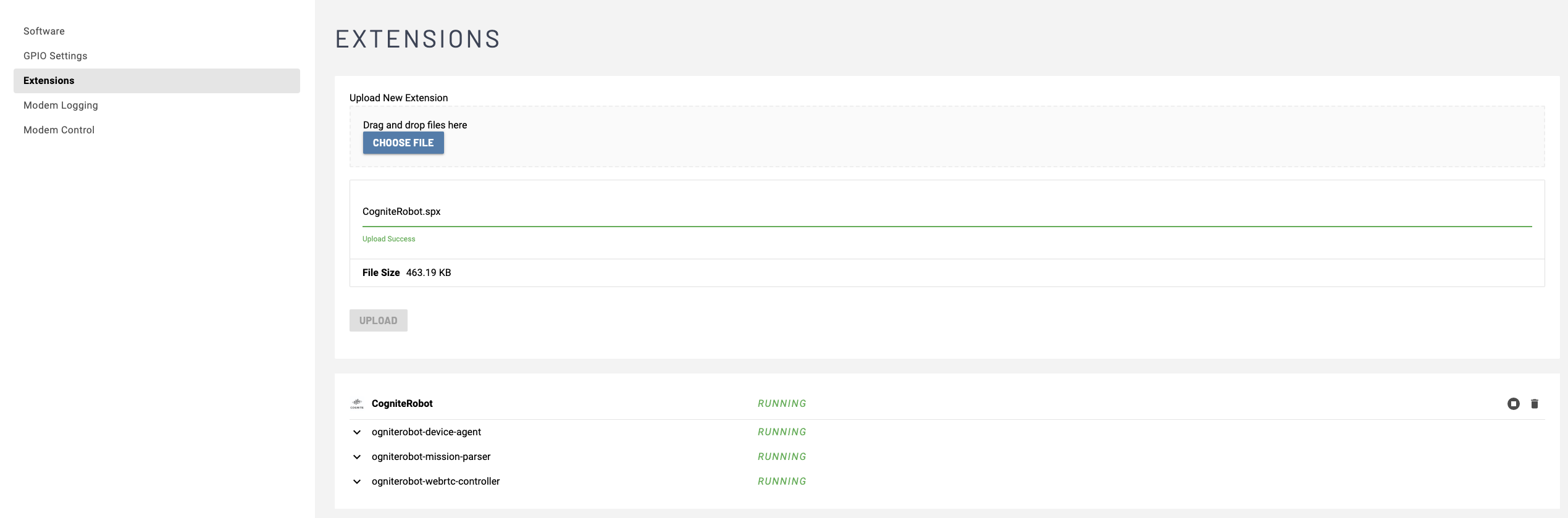
In the Spot CORE I/O interface, navigate to the Extensions page and upload the CogniteRobot.spx file. The extension starts running.
Print and place fiducials
Spot uses fiducials, QR code-like images, to align its internal map with the surroundings. Fiducials are essential at the start of each mission and should be placed along the entire mission path. Each point of Spot's route should have a visible fiducial. The default size for fiducial images is 146 mm x 146 mm, but you can adjust it in the robot's admin panel if needed.
Use 500-series fiducials to identify the docking stations only.
Place fiducials
Recommendations to follow when positioning fiducials:
- Place one fiducial at the mission’s starting location and one at the docking station.
- Place fiducials at ground level at the starting location.
- Tape fiducials securely against a wall in a location where they will persist. If fiducials shift after recording, the mission may no longer replay.
- Place fiducials low on the wall, with the top of the fiducial image at a human knee height, around 45-60 cm (18-24 in.) from the ground.
- Place fiducials in areas that are feature deserts, for example, a span of over 3m of a featureless white wall.
- Place fiducials on glass walls so that the robot avoids walking into the glass. You can also enhance glass walls with markers, such as AprilTags, post-it notes, or A4 sheets to create identifiable "features."
- Place fiducials at intersections to mark the area the robot can pass through several times. These loops can improve the quality of the map.
Things to avoid when positioning fiducials:
- Avoid using the same fiducial multiple times in a single mission. Each fiducial in a mission must be unique. However, you can use the same fiducial in other missions.
- Don't place fiducials in areas with inconsistent lighting. Shadowed or unevenly lit fiducials can have unreliable detections.
- Don't place fiducials on bright surfaces, such as windows.
- Don't place fiducials where they can be blocked, damaged, moved, or removed.
Train a robot map and upload it to CDF
Learn how to train robot maps with the Spot Autowalk functionality.
Set up VPN (optional)
Setting up a VPN on the robot can be beneficial for an easier upgrade. VPN lets you upgrade the device agent and the robot remotely. You will need a VPN setup or host it yourself.